About Us
Who Are We
Formed in 2014, Team Tiburon is an interdisciplinary team from The National Institute of Technology, Rourkela, that works towards designing and developing AUVs (Autonomous Underwater Vehicle) capable of performing a plethora of tasks, all without a human pilot. And we take pride in announcing that we have been actively developing bots capable enough to perform complex operations such as dropping, grabbing and torpedo shooting as deep as 10m, amongst others. Moreover, we take part in various Student AUV competitions at both National and International levels.


Watch the video
Our Journey
Team Tiburon had a humble beginning in 2014 and through consistent hard work coupled with our passion and dedication, we have excelled in many competitions at national and international levels. We secured the 2nd position at SAUVC (Singapore Autonomous Underwater Vehicle Challenge) 2018 organized by IEEE-OES Singapore chapter. We were the first Indian team to do so and we achieved this feat in our first attempt. We also secured the 3rd position at the National Competition on SAVe (Students’ Autonomous Underwater Vehicle) 2017 organized by NIOT, Chennai and IEEE-OES.The progress we have made so far would not have been possible without the support and sponsorship we received from various people and companies. We had worked hard to earn a spot in RoboSub 2019, world’s largest and oldest student AUV design and development competition held during July at San Diego, the USA which was organised by RoboNation, where multiple teams from all across the world participate and work towards innovation in the field of marine robotics and autonomous systems. In our very first attempt in this competition with such high reputation, we competed ourselves till the Semifinal round of the RoboSub 2019.
Awesome Work
Autonomous Underwater vehicle

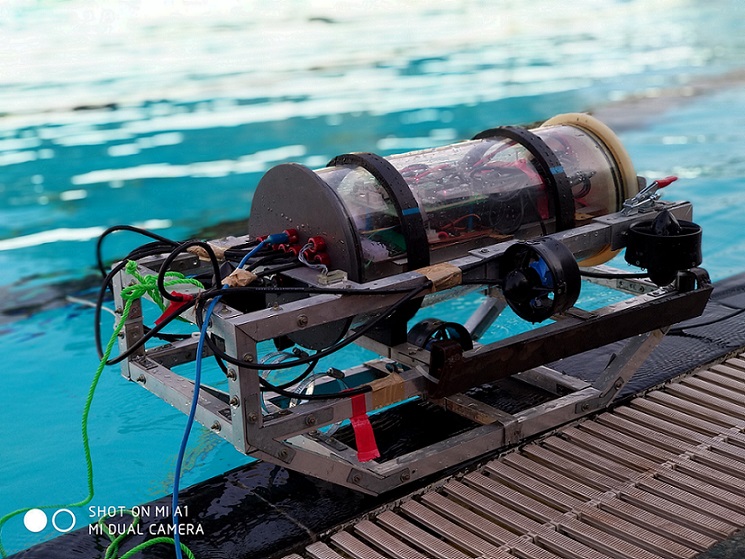
Tiburon 1.0
The first avenger
VEHICLE SPECIFICATIONS
Frame Dimensions: 94x50x45cm3
Weight: 20Kgf
Buoyancy: 22Kgf
Computing Unit: MSI H871AC Motherboard
Supporting Controller: Arduino and Pololu Maestro Servo Controller
Navigation Unit: VN-100
Degree of Freedom: 4
Approximate Cost of the Vehicle: INR 7,00,000
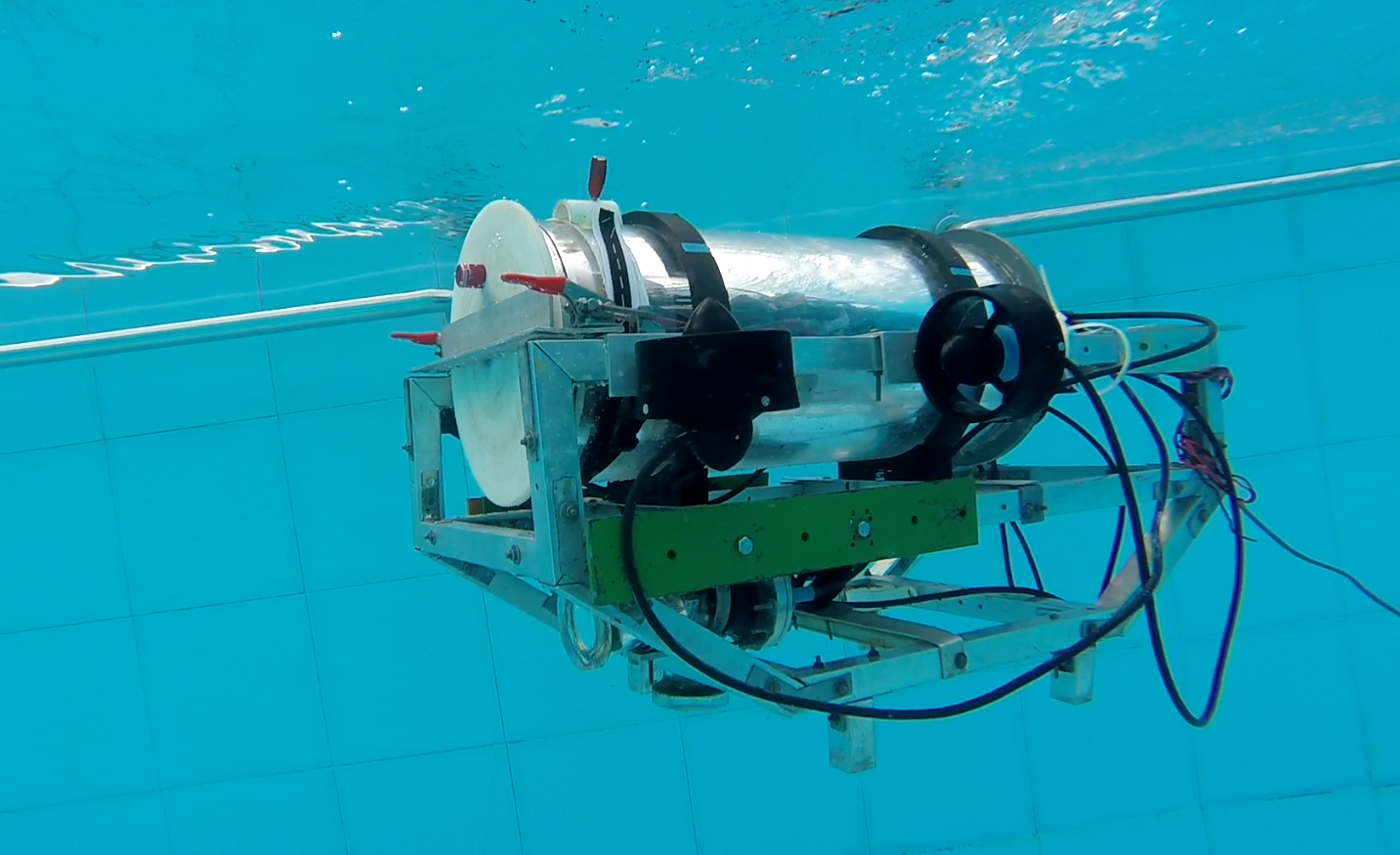
Tiburon 2.0
The second warrior
VEHICLE SPECIFICATIONS
Frame Dimensions: 75x59x60cm3
Weight: 15.3Kgf
Buoyancy: 16.1Kgf
Computing Unit: MSI H871AC Motherboard
Supporting Controller: Arduino and Pololu Maestro Servo Controller
Navigation Unit: VN-100
Degree of Freedom: 4
Approximate Cost of the Vehicle:(Including reused parts) INR 7,00,000
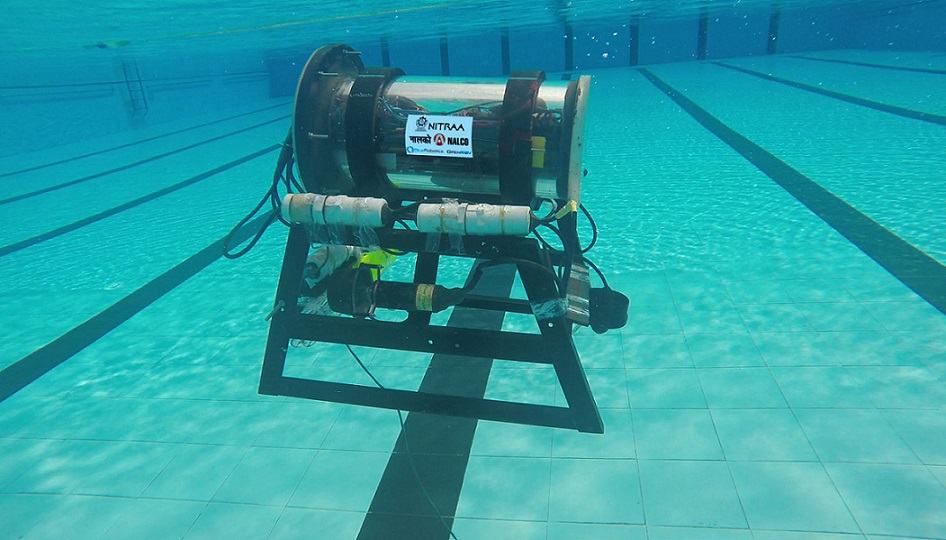
Tiburon 3.0
Hammerhead
VEHICLE SPECIFICATIONS
Frame Dimensions: 75x50x50cm3
Weight: 21Kgf
Buoyancy: 23.1Kgf
Computing Unit: Intel NUC
Supporting Controller: Arduino and Pololu Maestro Servo Controller
Navigation Unit: VN-100
Degree of Freedom: 6
Approximate Cost of the Vehicle: INR 4,00,000
Additional Features:
- Grabbing Mechanism
- Dropping Mechanism
- Torpedo Shooting Mechanism

Tiburon 4.0
Makara
VEHICLE SPECIFICATIONS
Frame Dimensions: 84x44x39cm3
Weight: 20.28Kgf
Buoyancy: 23.18Kgf
Computing Unit: Nvidia Jetson TX2
Supporting Controller: Arduino and Pololu Maestro Servo Controller
Navigation Unit: VN-100
Degree of Freedom: 6
Approximate Cost of the Vehicle: INR 4,00,000
Additional Features:
- Streamlined Body
- Permanent Face Sealing
- Increased Speed